News
Members
Publications
Software / Data
Job offers
Images / Videos
Collaborations
Conferences
Lab meetings: "Les partages de midi"
Practical information
Members Area
Next conferences we are in …



")

News
Members
Publications
Software / Data
Job offers
Images / Videos
Collaborations
Conferences
Lab meetings: "Les partages de midi"
Practical information
Members Area
Next conferences we are in …
The aim of surgical evaluation and training axe is addressing the main following challenges: systematic data collection, personalization of training program thanks to machine and deep learning, development of simulators for non-technical skills in robotic and non-robotic surgery, and development of simulators for patients.
Surgical skills are not the only parameters influencing surgical performance. Characteristics specific to each operator can also significantly influence this performance: the physiological state at the time of the task or the intrinsic skills of the operator outside the surgical field. Knowing these characteristics and their influence on performance can make it possible to propose personalized training plans.

The SunSet project aims at developing a software suite based on immersive and collaborative virtual reality technology for training and evaluating non-technical skills. The project is implemented in the context of the training of scrub nurses specialized in neurosurgery.More information
 The use of virtual reality (VR) is now proposed for surgical training because it offers a tool at the border between theoretical and practical realities. Arthroscopic surgery is particularly well suited to this VR simulation because of its per-operative visual feedback on a 2D screen. However, its validity when transposing the performance of the simulator to the real patient is not yet proven. To show that the student progressing on the simulator also becomes efficient in the operating room would be a considerable advance in medical training. More information
The use of virtual reality (VR) is now proposed for surgical training because it offers a tool at the border between theoretical and practical realities. Arthroscopic surgery is particularly well suited to this VR simulation because of its per-operative visual feedback on a 2D screen. However, its validity when transposing the performance of the simulator to the real patient is not yet proven. To show that the student progressing on the simulator also becomes efficient in the operating room would be a considerable advance in medical training. More information

In this project, we propose to study a solution for the computation of surgical procedural knowledge models from recordings of individual procedures and their execution. The objective is to develop an enabling technology for procedural knowledge-based surgical simulation systems. In this project, we demonstrate its potential added value for high-level abstraction teaching applications. More information

The growing of robotic assistance for laparoscopic interventions leads to a necessity to provide adequate formation to surgeons. For this purpose, different robotic systems are available to train technical skills. These systems provide multiple reproducible scenarios and automatic evaluation of the surgical tasks. Nevertheless, the main drawback of those training systems is the global evaluation of the training task only, which is not precise and informative enough for the trainee. This project is focusing on two objectives: recognize surgical gestures and provide an in-depth evaluation of the surgical robotic task. More information
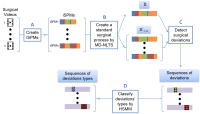
Around 14 % of patients underwent at least one adverse event during surgery and a third of those adverse events were preventable. The occurrence of adverse events forces surgeons to implement corrective strategies and, thus, deviate from the standard surgical process. Therefore, it is clear that the automatic identification of adverse events is a major challenge for patient safety. This project has to objective to detect and distinguish surgical process deviations in abdominal surgeries based on multi-dimensional non-linear temporal scaling with a hidden semi-Markov model using manual annotation of surgical processes. More information

Despite declarative knowledge acquired and perfectly mastered technical skills, a number of adverse events have been observed in the neurosurgical operating room (OR). These may have irreversible consequences and so cause serious functional impairment or vital complications. Surprisingly, these events were less often the result of a technical error than of a malfunction in the field of non-technical skills (NTS). On This project, we define a quantitative assessment metric of NTS in neurosurgery. More information
For completed projects, please refer to the past-projects page